
03-04.Transformation
Transformation
Basic of Transformation
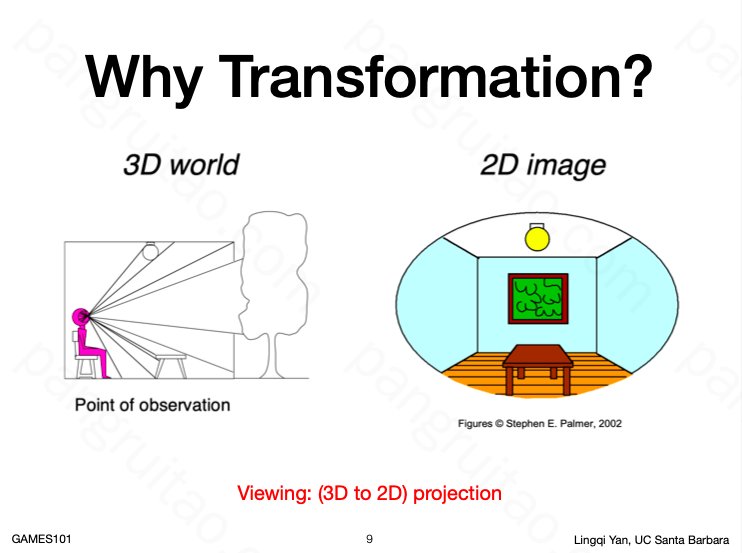
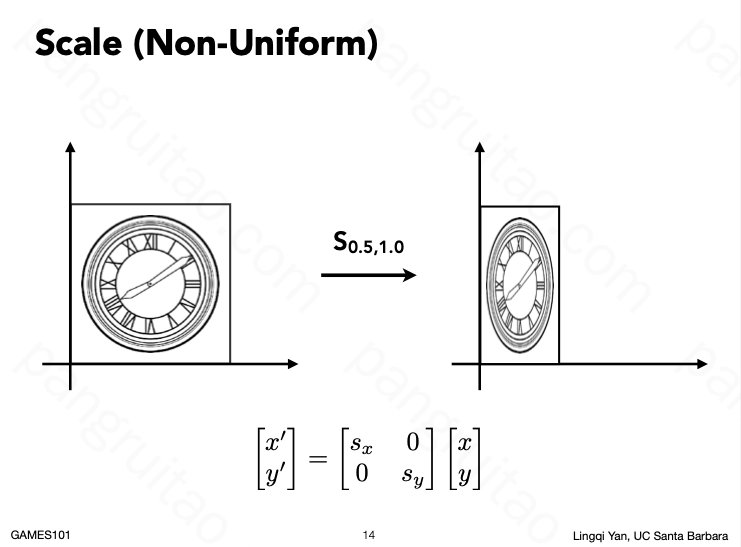
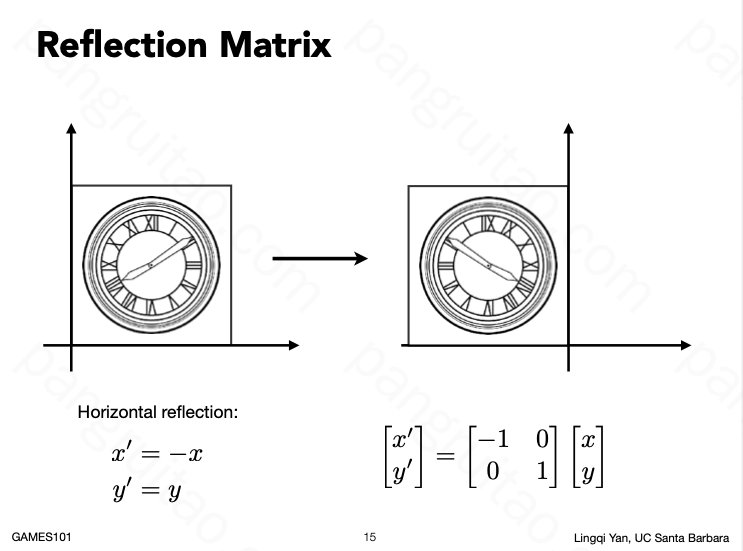
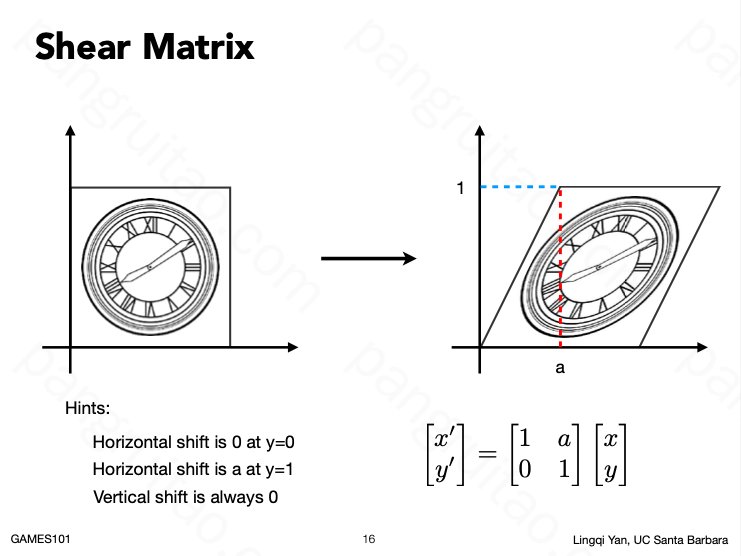
首先用几个例子(摄像机在空间中的运动、机器人运动、视角变换)介绍一下为什么要用 Transformation,之后介绍几种二维上的基本变换。
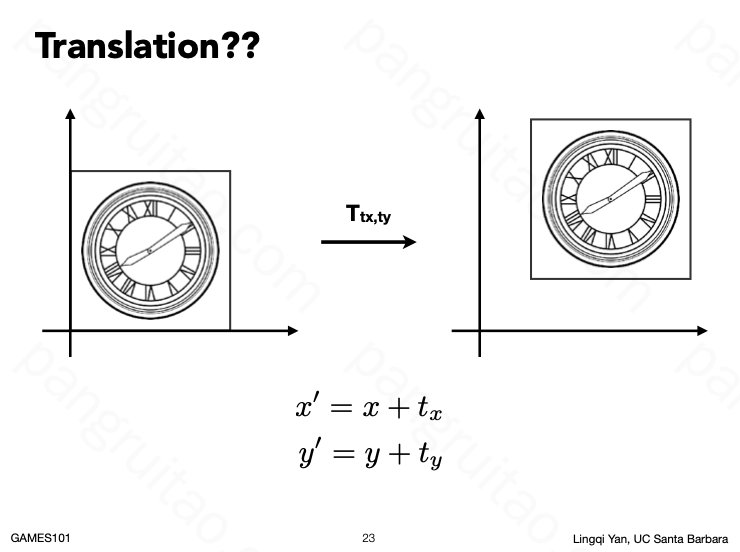
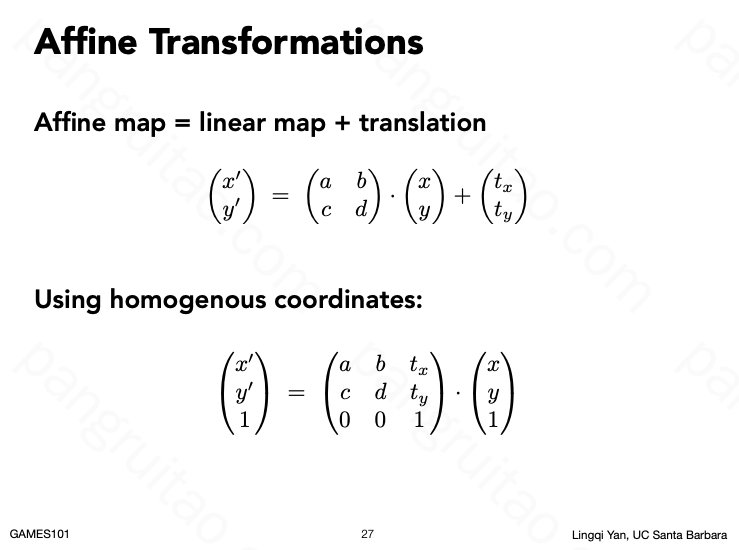
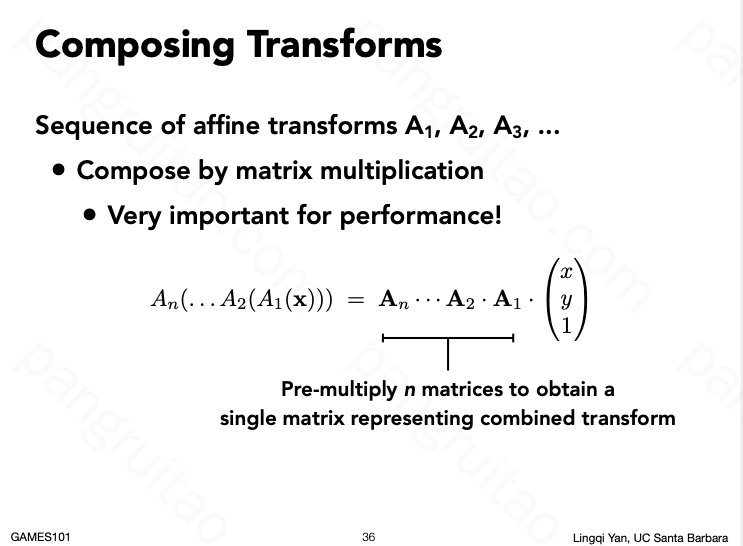
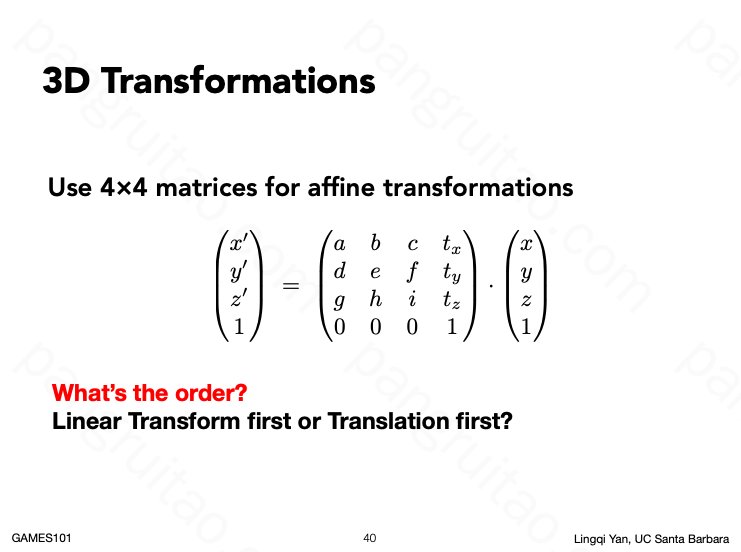
平移变换,但通常在齐次坐标下进行。合在一起成为仿射变换:
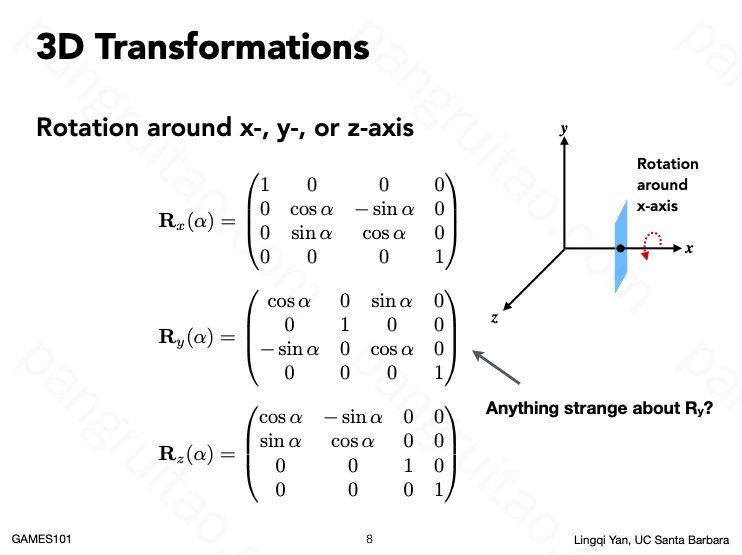
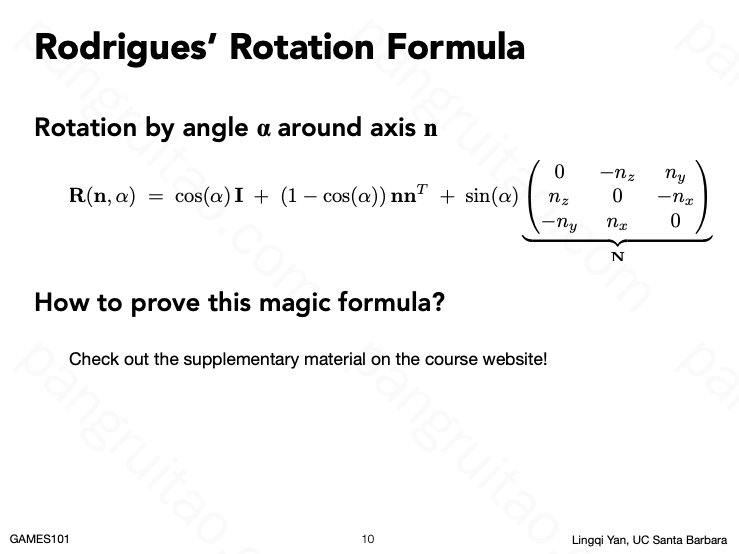
3D 的缩放、镜像、切变基本和 2D 可直接类比。但是旋转会有一些麻烦。这是一种解决方案,将任意旋转分解为绕坐标轴旋转。并且这里需要注意坐标系,课程中使用的是右手坐标系,部分 API 和软件会使用左手坐标系。
Camera Transformation
三维摄像机有 7 个维度
- 位置:3 维
- 朝向:3 维
- 画面旋转:1 维
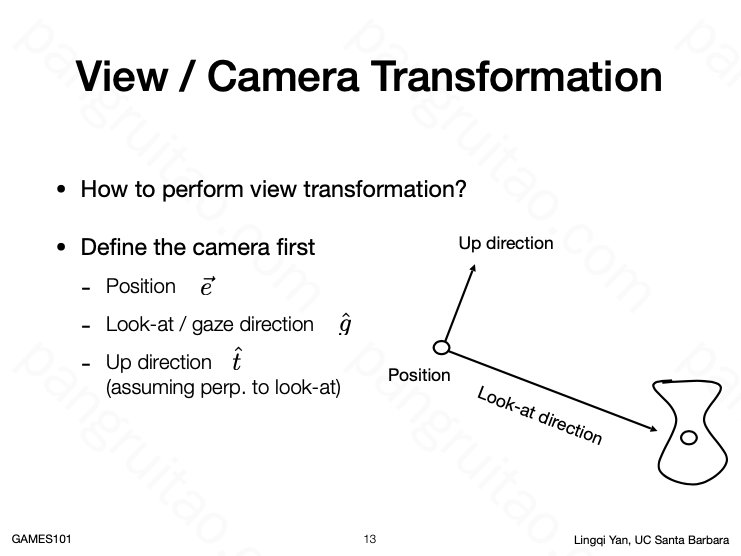
通常用三个向量进行对应
- 位置向量
- 朝向向量
- 上方向量(由于一定和朝向正交,所以会冗余 2 维)
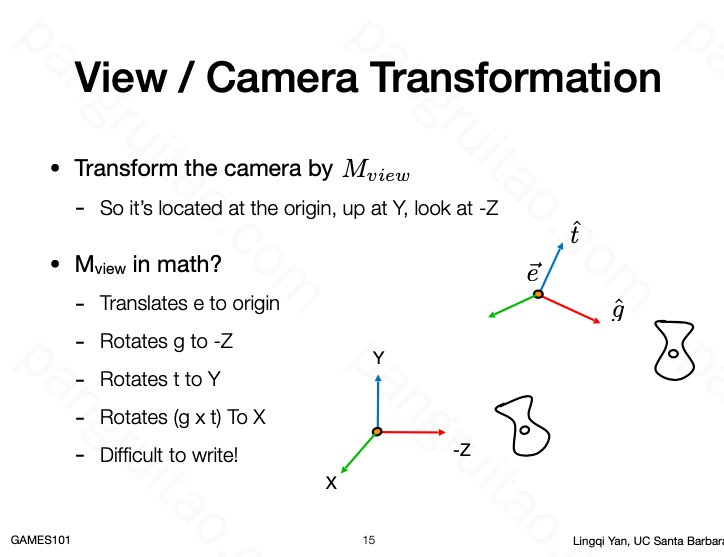
正向考虑摄像机变换的矩阵是比较麻烦的一件事情:
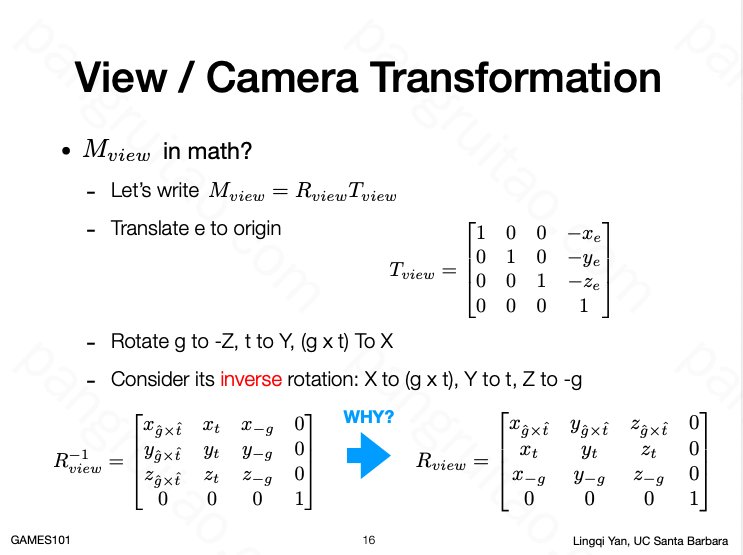
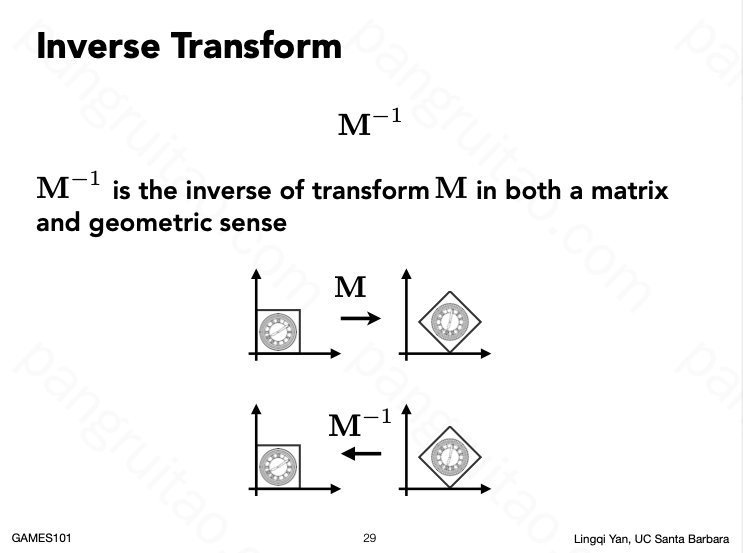
但反向考虑则比较容易,所以可以通过反向考虑,配合矩阵求逆得到结果。
Projection Transformation
投影变换本身是一个降维变换,图形学中主要针对于将三维投影至二维:
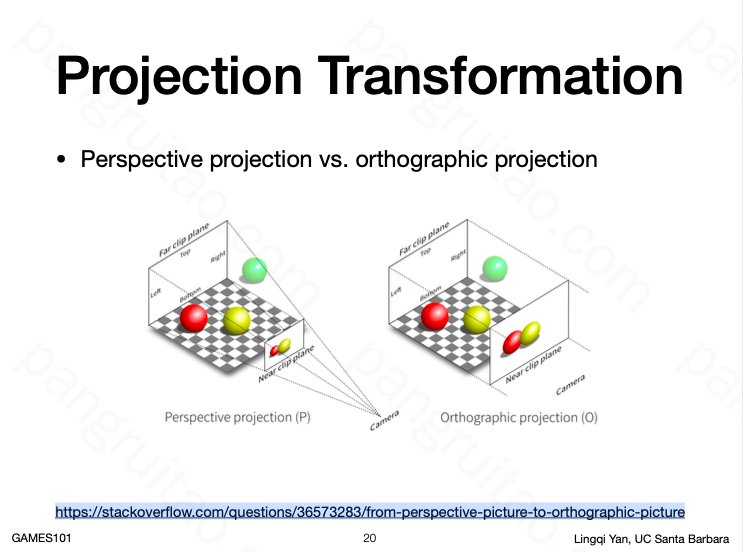
3D 至 2D 的投影主要有两种:平行投影和透视投影:
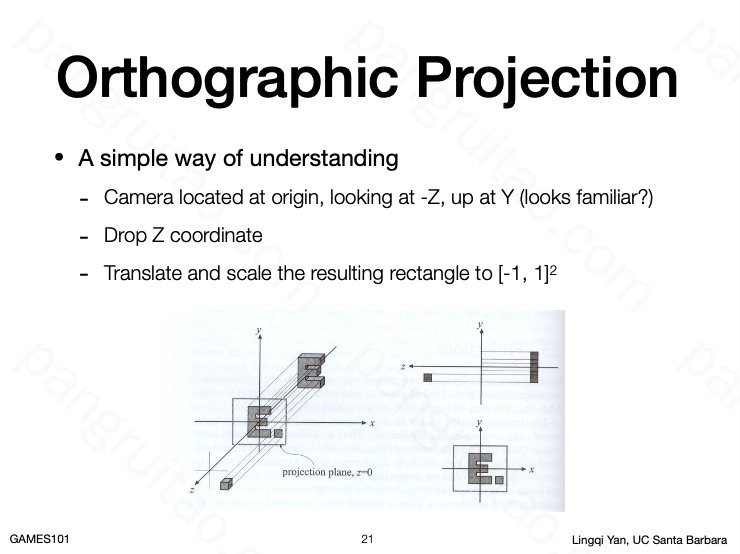
平行投影的操作比较简单,直接丢掉坐标中的 Z 分量即可。
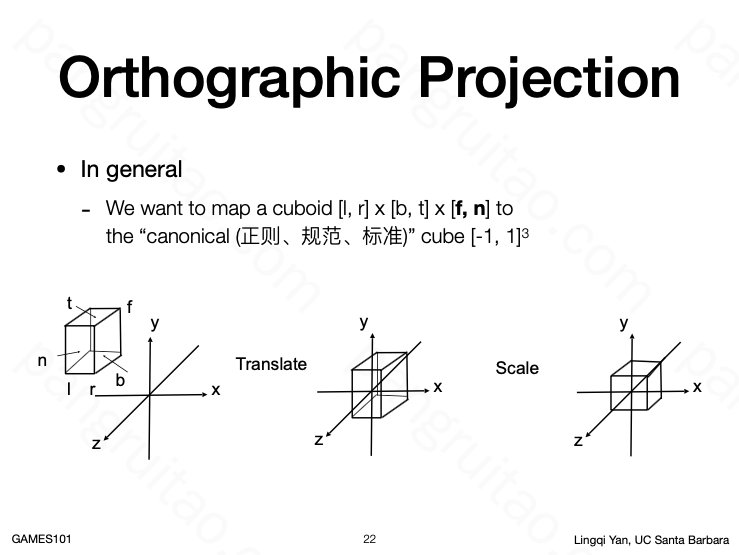
但通常需要 canonical,即首先将视图空间中心平移至原点,再缩放为标准正方体。
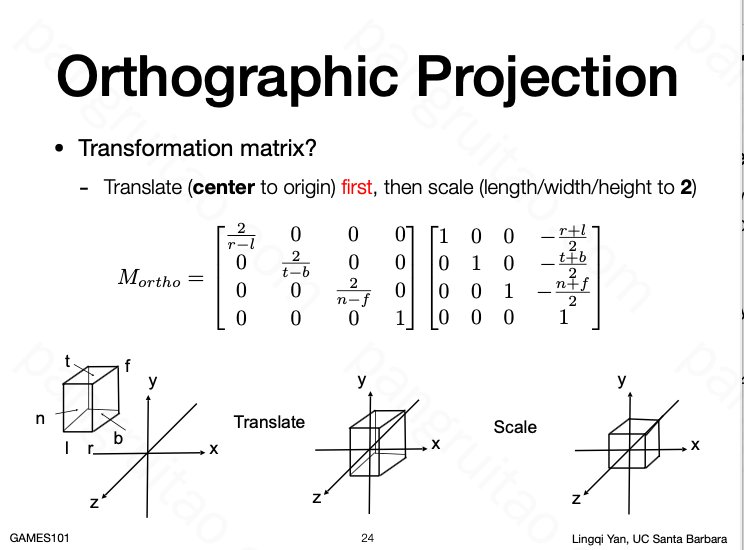
整理一下可知这一系列操作对应的矩阵。
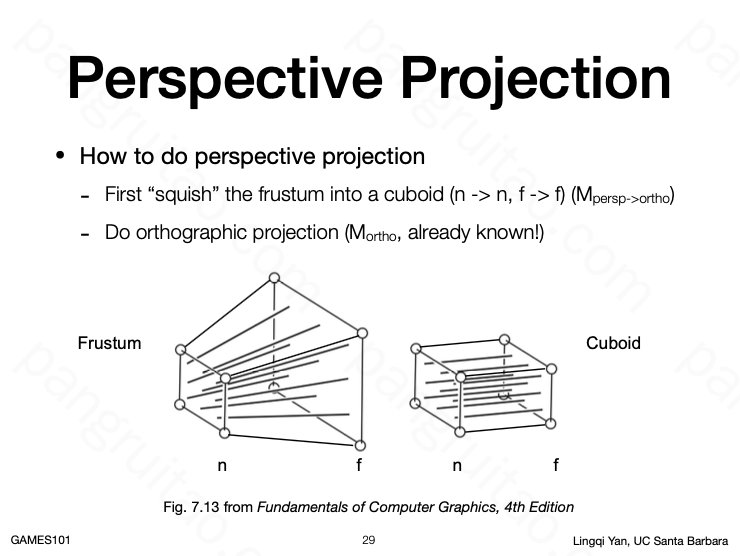
透视投影本质上是将空间投影至一个点,但在过程中用一个平面(如胶片)截下。而对于透视变换,可以考虑将其先变换为平行,再用平行投影。
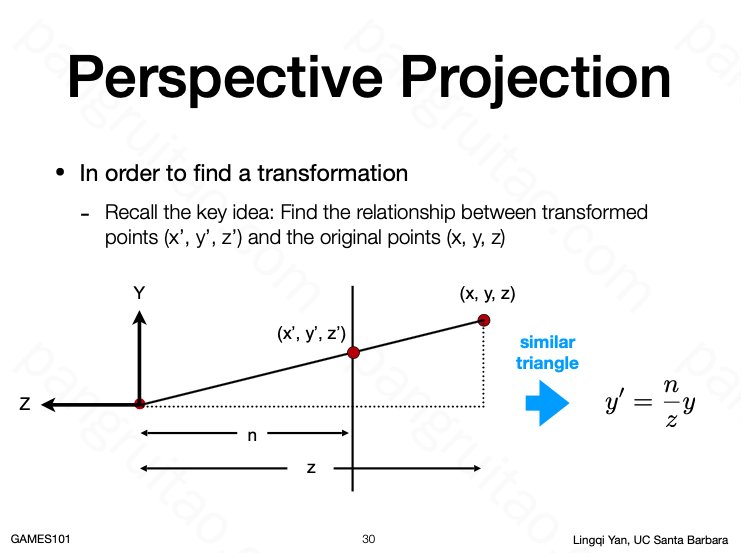
这个矩阵并不直观,但是可以通过设立条件对矩阵进行推导
- 胶片所在平面不发生变化
- 而远处的平面大小缩放至和胶片一样大,且中心对齐,但 Z 值不变